Know How
ΣΥΣΤΗΜΑ ΔΙΕΥΘΥΝΣΗΣ PART IV

Ένα βήμα παραπέρα
Όσα είδαμε ως τώρα στα τρία πρώτα μέρη της σειράς μας, ήταν μία εις βάθος τεχνική ανάλυση του συστήματος διεύθυνσης, της λειτουργίας του και των υποσυστημάτων του, αλλά από την άλλη εξηγήσαμε κυρίως πράγματα και καταστάσεις που αφορούν ένα τυπικό σύστημα ενός τυπικού αυτοκίνητου, από παλιότερες γενιές μοντέλων μέχρι και τις σημερινές: ακόμα και τα «περίεργα» ηλεκτρικά τιμόνια που είδαμε τον προηγούμενο μήνα, πλέον τα συναντάς παντού και σε όλες τις κατηγορίες, ενώ τα υδραυλικά τιμόνια στα οποία επίσης εντρυφήσαμε, παρόλο που είναι ..αρχαία εφεύρεση, ακόμα (ευτυχώς!) είναι εδώ και μας χαρίζουν αίσθηση των τροχών σε πολύ υψηλά επίπεδα. Αλλά ναι, ΟΚ, ενώ πρακτικά όλα τα αυτοκίνητα εκεί έξω είναι «τυπικών προδιαγραφών» και κατά 99% εγώ και εσείς πάνω-κάτω «τυπικά» αυτοκίνητα οδηγούμε, αυτό δεν σημαίνει πως θα αφήσουμε στην απ’ έξω τα πιο σπάνια, βαρβάτα και φυσικά ακριβά συστήματα και τις παραλλαγές τους: ίσα ίσα που σήμερα θα βουτήξουμε σε αυτά και θα δούμε την αφρόκρεμα των high-end συστημάτων τα οποία, χωρίς να είναι αναγκαστικά «φρεσκότατα», εντούτοις ξεφεύγουν παντελώς από την πεπατημένη. Αν νομίζετε ότι η ιστορία τελειώνει στην διαρκή μεταβολή μονάχα της σκληρότητας του τιμονιού (μεταβλητή υποβοήθηση) με διάφορα κουμπάκια και αισθητήρες, σαν αυτά που είδαμε στο Part III είστε γελασμένοι: γιατί να μην έχουμε και άπειρα «κορωνοπήνια» στη κρεμαγιέρα μας, διαθέτοντας γρήγορο ή αργό τιμόνι κατά βούληση και αλλάζοντας τις στροφές από άκρη σε άκρη κατά το δοκούν? Καλώς ήρθατε στα τιμόνια μεταβλητής σχέσης μετάδοσης. Ακόμα πιο γελασμένοι θα είστε αν πιστέψετε πως ο εμπρός άξονας έχει πάρει εργολαβία το στρίψιμο του αυτοκινήτου και ο πίσω απλά τεμπελιάζει (στα προσθιοκίνητα) ή απλά σπρώχνει (στα πισωκίνητα), όντας συμμορφωμένος στην γεωμετρία Άκερμαν που είδαμε στο πρώτο μέρος. Θα τον βάλουμε και αυτόν στο παιχνίδι στρίβοντας -κυριολεκτικά εδώ- με τα τέσσερα!
Μεταβλητή υποβοήθηση μόνο? Όχι, και βήμα!
Σε ένα αγγελικά πλασμένο κόσμο, πως θα έπρεπε να ήταν το ιδανικό σύστημα διεύθυνσης? Η απάντηση είναι εύκολη: θα πρέπει να ταιριάζει «γάντι» ως προς τα χαρακτηριστικά λειτουργίας του στις εκάστοτε απαιτήσεις του οδηγού, λαμβάνοντας υπόψη τόσο τις συνθήκες οδήγησης, όσο και τις δικές του ιδιαίτερες προσταγές κατά το στρίψιμο στο όριο. Πρέπει λοιπόν το σύστημα διεύθυνσης να είναι προσαρμόσιμο σε πλήθος διαφορετικών καταστάσεων που μπορούν να παρουσιαστούν στο δρόμο: ταξιδεύοντας στην εθνική με υψηλές ταχύτητες θέλουμε ένα τιμόνι με σκληρή αίσθηση και μακρύ ως προς την διαδρομή του από άκρη σε άκρη, έτσι ώστε οι εντολές μας να εκτελούνται με κάποια προοδευτικότητα και χωρίς απότομες αλλαγές στην πορεία του οχήματος. Αντίθετα, κινούμενοι μέσα στην πόλη ή κατά τους ελιγμούς παρκαρίσματος, θα θέλαμε ένα τιμόνι όσο γίνεται περισσότερο ελαφρύ, αλλά με μικρή διαδρομή από άκρη σε άκρη ώστε να μην χρειάζεται να χέρια μας να κάνουν άσκοπους συνεχείς κύκλους γυρίζοντάς το. Σε κάθε περίπτωση επιθυμούμε να διατηρήσουμε την αμεσότητα στην επικοινωνία οδηγού-οχήματος, μέσω της μεταφοράς από το σύστημα διεύθυνσης στα χέρια του οδηγού όσο το δυνατόν περισσότερης πληροφορίας για τη κατάσταση του δρόμου και της πρόσφυσης των τροχών.
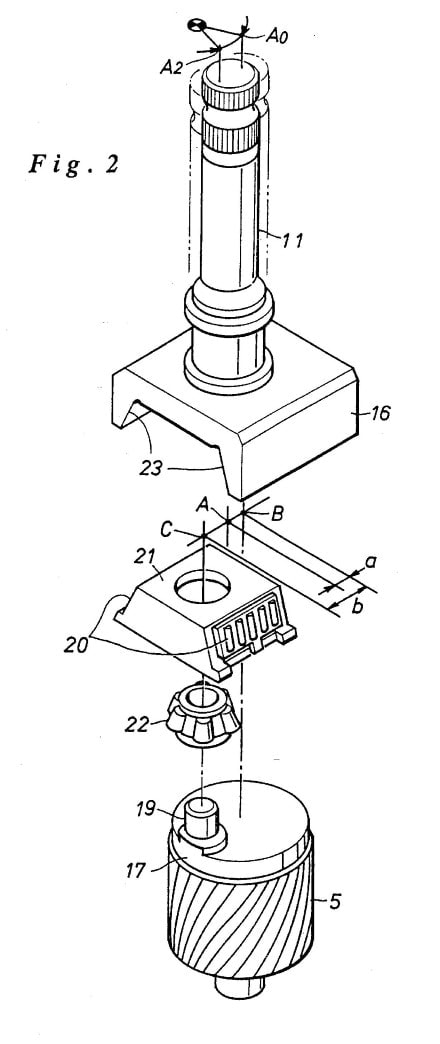
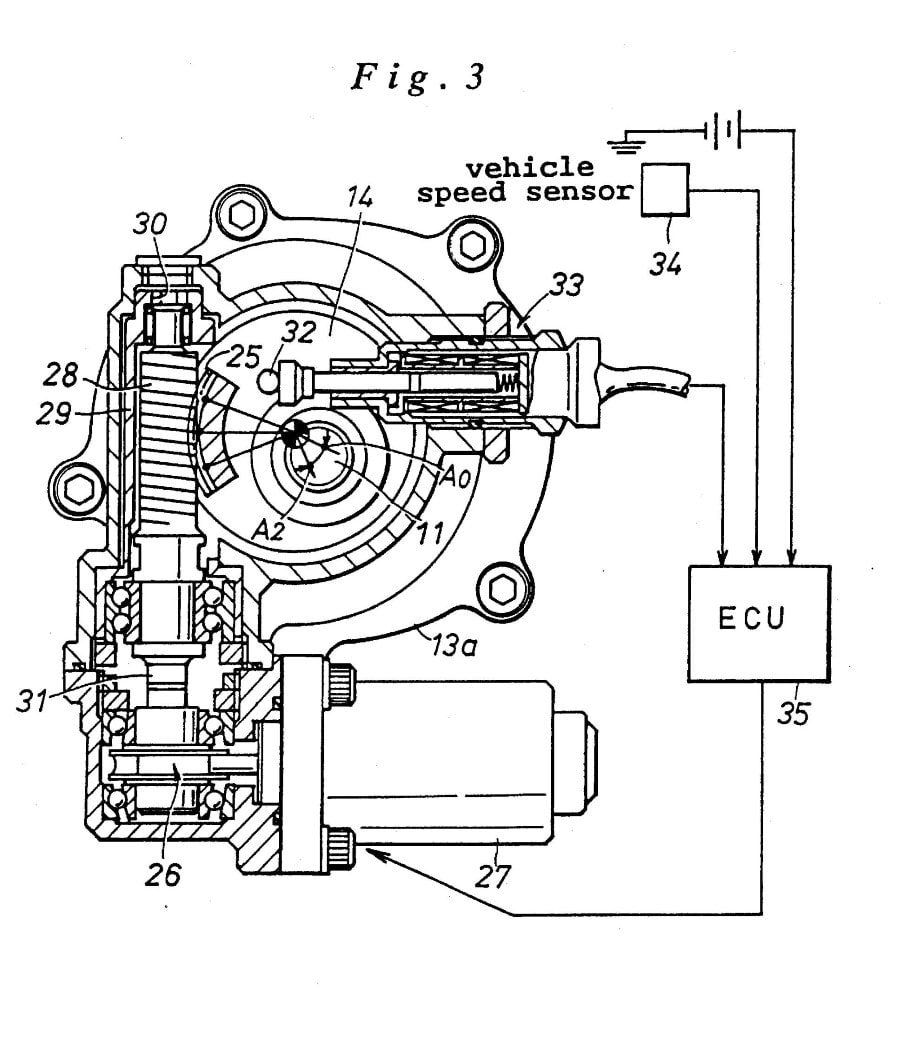
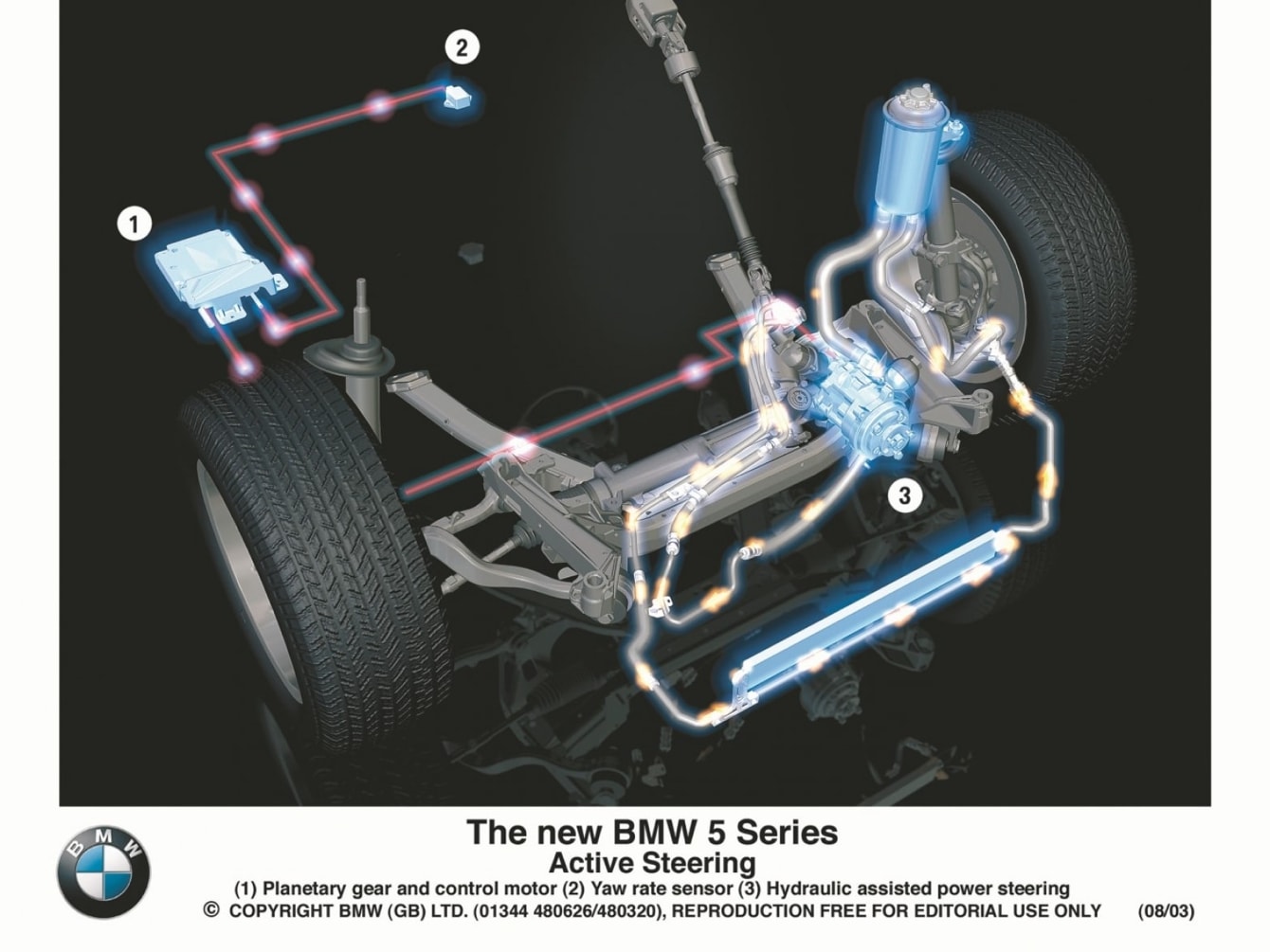
Όπως είδαμε αναλυτικά στο Part III, προσπαθώντας να συνδυάσουν τα παραπάνω «ασυμβίβαστα», οι κατασκευαστές αυτοκινήτων μέχρι τώρα έχουν παρουσιάσει συστήματα μεταβλητής υποβοήθησης στα οποία, ωστόσο, ο όρος «μεταβλητή» αναφέρεται στη σκληρότητα και μόνο του τιμονιού ανάλογα με την ταχύτητα του οχήματος και όχι και στη μεταβολή της σχέσης γωνίας περιστροφής τιμονιού προς την αντίστοιχη γωνία στροφής τροχών, τη «σχέση μετάδοσης» δηλαδή της κρεμαγιέρας. Με άλλα λόγια, για δεδομένη μέγιστη γωνία στροφής των τροχών το ιδανικό θα ήταν να μπορούσε να ήταν μεταβλητός ο -μαγικός για τους πραγματικούς οδηγούς- αριθμός, που ονομάζεται «στροφές τιμονιού από άκρη σε άκρη». Προσοχή, δεν μιλάμε απλά για «μη γραμμικές» κρεμαγιέρες, μέσω ειδικής οδόντωσης στο κανόνα τους (για περισσότερα επί αυτών βλ. PartI της σειράς) όπου το «μεταβλητό βήμα» έχει ως παράμετρο μόνο την γωνία στροφής του τιμονιού, αλλά για πραγματικό μεταβλητό βήμα που λαμβάνει υπόψιν και πλήθος άλλων παραγόντων όπως είναι η ταχύτητα του οχήματος και οι διάφορες τιμές επιταχύνσεων του στους τρεις άξονες. Οι πρώτοι που παρουσίασαν σύστημα διεύθυνσης μεταβλητής σχέσης μετάδοσης ήταν το 2000 (η πατέντα είχε κατατεθεί από τον Γενάρη του 1995), ποιοι άλλοι, οι Ιάπωνες της Honda σε μία περιορισμένης παραγωγής ειδική έκδοση του AP1 S2000, την “Type V”, με το σύστημα να ονομάζεται “VGS” (“Variable Gear ratio Steering”). Μόλις 4.000 κομμάτια αποκλειστικά για την JDM αγορά κυκλοφόρησαν από το Type V, το οποίο εξωτερικά ξεχωρίζει μόνο από το flat-bottom τιμόνι του και το VGS σηματάκι πίσω. Μηχανικά, αυτά τα S2000 είχαν διαφορετικά αμορτισέρ, αντιστρεπτικές και εμπλοκή διαφορικού ώστε να προσαρμόζονται στις ανάγκες του VGS. Το VGS έπαιρνε σήμα εισόδου από την γωνία του τιμονιού και από την ταχύτητα του οχήματος και λειτουργούσε μέσω ενός πραγματικά ευφυούς μηχανισμού, όπου χώριζε την κολώνα σε δύο σπαστά κομμάτια: ανάμεσα στον άξονα εισόδου και εξόδου της σπαστής αυτής κολώνας παρεμβάλλονταν μία διάταξη με έκκεντρο αξονάκι, κωνικό ρουλεμάν και βελονοειδές ρουλεμάν, όπου μέσω της περιστροφής του έκκεντρου άξονα με σπείρωμα ατέρμονα κοχλία από μοτεράκι που έπαιρνε σήμα από την ECU, άλλαζε η σχετική σχέση μετάδοσης της κίνησης από το πάνω κομμάτι της κολώνας στο κάτω. Μέσω της διάταξης αυτής, από τις 2,4-2,6 στροφές από άκρη σε άκρη που έχει το τιμόνι του S2000 ανάλογα με την έκδοση, σε ελιγμούς εν στάσει το Type V, μέσω του VGS, τις μείωνε στις 1,4. Οι Ιάπωνες όμως ποτέ δεν ήταν καλοί στο να αναδεικνύουν την δουλειά τους και τις τεχνολογικές πρωτοπορίες τους μέσω σωστού PR, και έτσι η κρυψίνους Honda πέρασε τα Type V / VGS εντελώς στο ντούκου. Είχε βγάλει απλά ένα λιτό δελτίο τύπου, χωρίς τεχνικές φωτογραφίες και λεπτομέρειες, όσα σας έγραψα για το σύστημα παραπάνω, όπως και η συνοδευτική φωτογραφία, είναι από το υλικό κατάθεσης της πατέντας το ‘95. Έτσι, έκανε τσάμπα μάγκες -στην συνείδηση του κόσμου- τους Γερμανούς: ως πρωτοπόρος στα εν λόγω συστήματα καθιερώθηκε η BMW, με το «επαναστατικό» σύστημα διεύθυνσης Active Steering, το οποίο έκανε το ντεμπούτο του ως κομμάτι του προαιρετικού εξοπλισμού της προηγούμενης σειράς 5 (Ε60) το 2003. Μιας και οι Γερμανοί, αντιθέτως, δεν κρύβονται στο τι κάνουν και πως το κάνουν, θα το δούμε πιο αναλυτικά.
BMW Active Steering
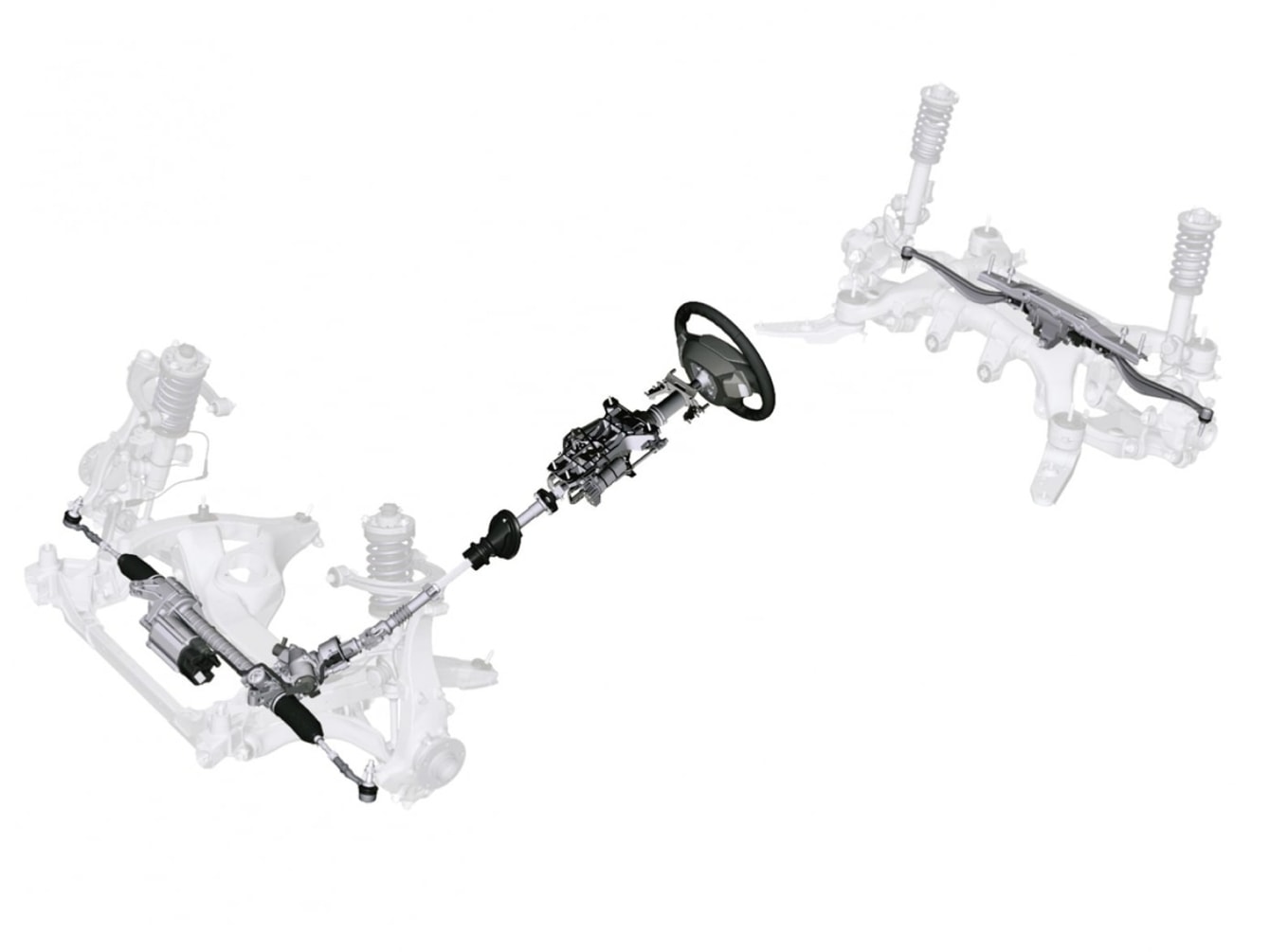
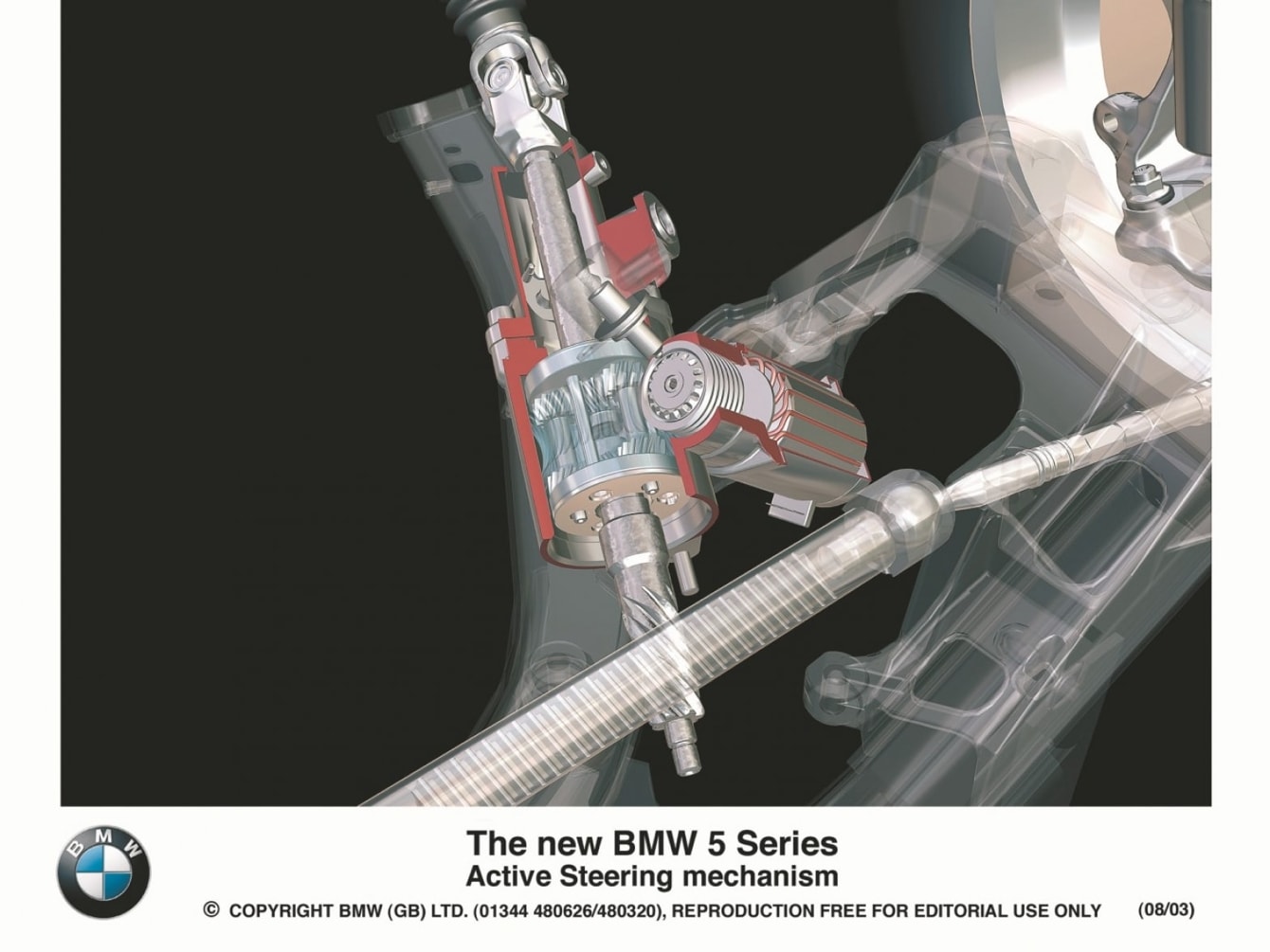
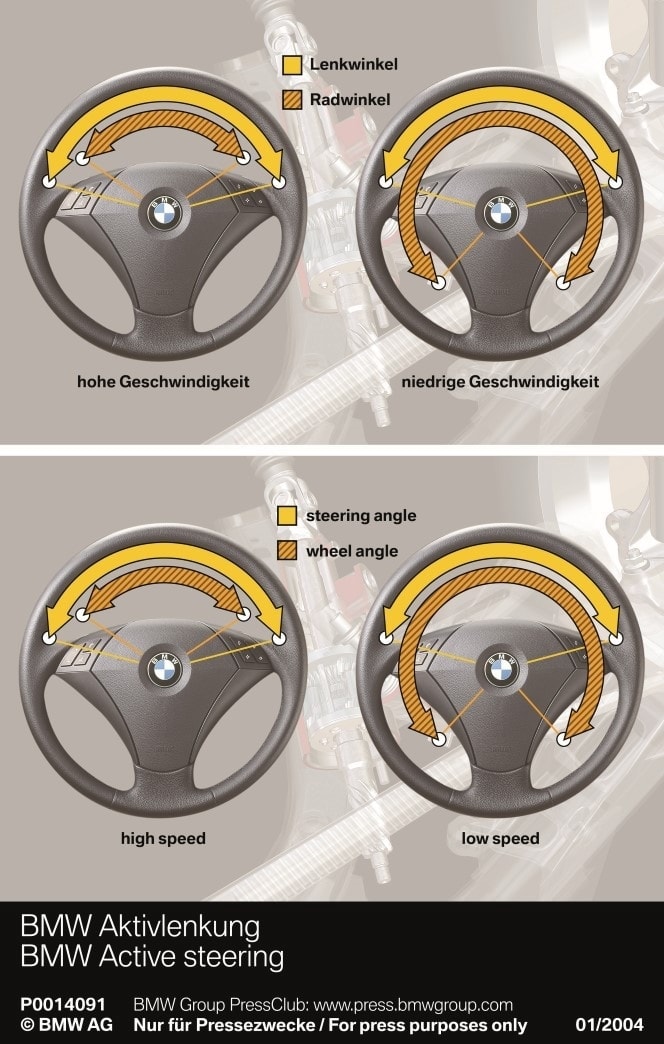
Όπως εξηγήσαμε, σε ένα συμβατικό σύστημα διεύθυνσης κάθε κίνηση του τιμονιού μεταφράζεται σε ίδια μετακίνηση των τροχών, εξαιτίας της σταθερής σχέσης μετάδοσης μεταξύ του γραναζιού (πινιόν) στην άκρη της κολώνας του τιμονιού και της κρεμαγιέρας (κανόνα). Διαλέγοντας λοιπόν μια κοντή σχέση μετάδοσης μεταξύ αυτών των δύο βολευόμαστε στους ελιγμούς με μικρές ταχύτητες, αφού με λυμένο το θέμα της σκληρότητας από το όποιο υποσύστημα υποβοήθησης (βλ. Part III), με τον τρόπο αυτό έχουμε μικρή διαδρομή από άκρη σε άκρη, όμως με ένα «αλλά»: στα πολλά χιλιόμετρα οι αντιδράσεις στις εντολές του τιμονιού θα είναι απότομες. Το αντίστροφο συμβαίνει διαλέγοντας μια μακρύτερη σχέση μετάδοσης, όπου και πάλι δεν μπορούμε να είμαστε ικανοποιημένοι σε κάθε περίπτωση. Το παραπάνω σκόπελο μπορούν και ξεπερνάνε κάποια υπό εξέλιξη steer-by-wire (βλ. ειδική μνεία παρακάτω) συστήματα, τα οποία ωστόσο χάνουν πολύ σε αίσθηση καθώς δεν υπάρχει άμεση μηχανική διασύνδεση μεταξύ τροχών και τιμονιού. Σκοπός του ActiveSteering είναι να συνδυάσει την προσαρμοστικότητα των steer-by-wire συστημάτων με το feedback που προσφέρει ένα παραδοσιακό μηχανικό σύστημα διεύθυνσης. Αυτό επιτυγχάνεται με τον εξής μηχανισμό: παρεμβάλλεται ένας ηλεκτρομηχανικός ρυθμιστής ανάμεσα στην κολώνα του τιμονιού και την μετάδοση στην κρεμαγιέρα, ο οποίος προσθέτει ή αφαιρεί γωνία στριψίματος σε αυτή που ο οδηγός καθορίζει μέσω του τιμονιού. Μέχρι εδώ η φιλοσοφία είναι ίδια με αυτήν του VGS της Honda, όμως ο τρόπος υλοποίησης διαφέρει: πυρήνας του συστήματος είναι ένα πλανητικό σύστημα γραναζιών ενσωματωμένο στην κολώνα του τιμονιού, το οποίο διαθέτει δύο άξονες εισόδου και έναν εξόδου. Ο ένας άξονας εισόδου συνδέεται με το τιμόνι, ο δεύτερος με ένα βηματικό ηλεκτροκινητήρα μέσω ενός γραναζιού υποπολλαπλασιασμού της σχέσης μετάδοσης, ενώ ο άξονας εξόδου που καταλήγει στην κρεμαγιέρα παίρνει τις στροφές του προσθετικά από τις εντολές του ηλεκτροκινητήρα και του οδηγού. Όσον αφορά την απαιτούμενη δύναμη για το στρίψιμο των τροχών, αυτή δεν συσχετίζεται με τον προαναφερθέντα μηχανισμό του Active Steering αλλά συνεχίζει να καθορίζεται από το ξεχωριστό σύστημα υποβοήθησης, όπως για παράδειγμα είναι το Servotronic που ξεσκονίσαμε στο Part III. Τα επιπλέον υποσυστήματα του Active Steering περιλαμβάνουν την ηλεκτρονική μονάδα διαχείρισης και πλήθος αισθητήρων, που παίρνουν πληροφορίες τόσο από τις παραμέτρους κίνησης του αυτοκινήτου, όσο και από τις εντολές του οδηγού. Στο δρόμο τώρα, το ποσοστό και ο τρόπος εμπλοκής του Active Steering εξαρτάται άμεσα από τις εκάστοτε συνθήκες. Στις μικρές ταχύτητες το σύστημα ακολουθεί την φορά κατά την οποία στρίβει ο οδηγός το τιμόνι, κάνοντας το ταυτόχρονα πιο κοντό και δίνοντας καρτίστικη αίσθηση. Στις υψηλές ταχύτητες ο ηλεκτροκινητήρας δουλεύει στην αντίθετη φορά περιστροφής από αυτή του τιμονιού, αφαιρεί δηλαδή γωνία στροφής από το τιμόνι, κάνοντας το σύστημα διεύθυνσης πιο μακρύ από άκρη σε άκρη. Έτσι για ελιγμούς παρκαρίσματος μέσα στην πόλη, εκεί που ο οδηγός χρειαζόταν 3 περίπου στροφές για πλήρες κλείδωμα του τιμονιού από άκρη σε άκρη, με το ActiveSteering χρειάζεται μόλις 2.
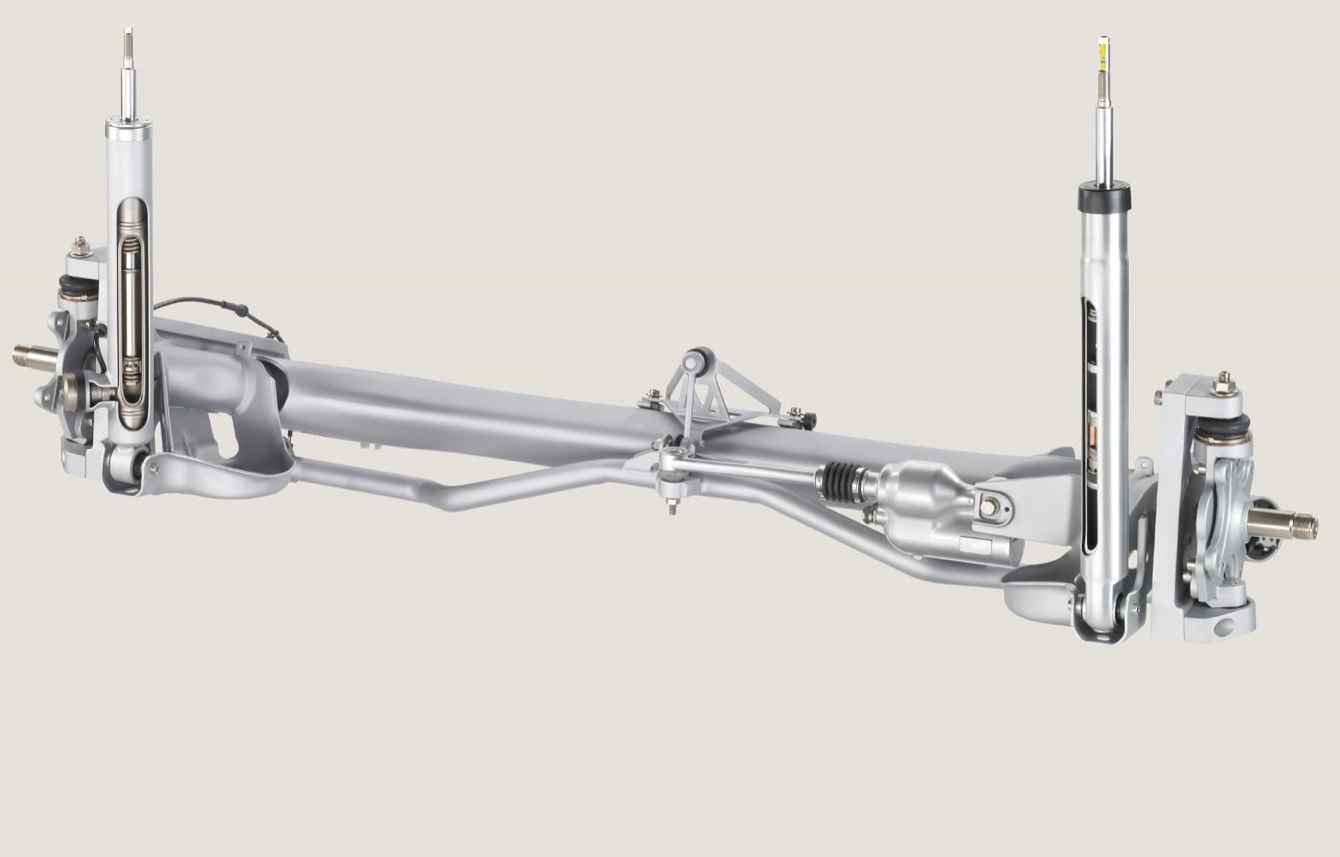
Ένα ενδιαφέρον σενάριο είναι αυτό κατά το οποίο έχουμε αποσταθεροποίηση του αυτοκινήτου με υποστροφή ή υπερστροφή, όπου η συνεργασία του ActiveSteering με το σύστημα ελέγχου της ευστάθειας (DSC) είναι το Α και το Ω: πρώτα μπαίνει στο παιχνίδι το Active Steering και στη συνέχεια και μόνο εφόσον δεν μπορέσει από μόνο του να επαναφέρει το αυτοκίνητο στη σωστή πορεία, τότε επεμβαίνει και το DSC για να σώσει την κατάσταση. Ταυτόχρονα με την BMW το 2003, σύστημα μεταβλητού βήματος είχε παρουσιάσει και η Toyota / Lexus με τα Land Cruiser / LX 470 (και αργότερα και στα LS / GS), το «Gear Ratio Steering» (VGRS): σε αντίθεση με τα άλλα δύο συστήματα που προαναφέραμε, εδώ έχουμε ομοαξονική διάταξη των εξαρτημάτων τα οποία, μεταξύ άλλων, περιλαμβάνουν έναν μικρό ηλεκτροκινητήρα μόνιμου μαγνήτη, εμπλεκόμενους δακτυλίους-γρανάζια με εσωτερική ή εξωτερική οδόντωση εν είδει ρότορα / στάτορα και ένα ειδικό παραμόρφωσιμο γρανάζι με διαμόρφωση εκκέντρου. Ιάπωνες...
Τετραδιεύθυνση για «παθητικούς»...
Σαν πολύ δεν ασχοληθήκαμε με την πάρτι του εμπρός άξονα όμως? Γιατί να μην μπορούμε να ρυθμίζουμε την αλλαγή κατεύθυνσης με τον πλέον «επιστημονικό» τρόπο, δηλαδή παίζοντας και με τις τέσσερις γωνίες-τροχούς του αυτοκίνητου και όχι με τις δύο? Ώρα λοιπόν να βάλουμε και τον πίσω άξονα στο παιχνίδι, μιλώντας για τις διάφορες υλοποιήσεις «τετραδιεύθυνσης». Έχετε κατά καιρούς ακούσει για ενσωμάτωση «παθητικής τετραδιεύθυνσης» σε διάφορα αυτοκίνητα, δηλαδή για την «εκούσια πρόβλεψη» να στρίβει ελαφρώς ελεγχόμενα και ο πίσω άξονας, προς όφελος της οδηγικής συμπεριφοράς του οχήματος. Πολλά αυτοκίνητα καυχιούνται λιγότερο ή περισσότερο ότι διαθέτουν παθητική τετραδιεύθυνση μέσω του πίσω άξονα, αλλά πως ακριβώς δουλεύει η ιστορία? Η φυσική τάση γενικώς των πίσω τροχών ενός οχήματος, αν τους αφήναμε στην τύχη τους καθώς αυτό στρίβει, είναι να στρίβουν προς το εξωτερικό τις στροφής (σε αντίθετη φορά με τους εμπρός δηλαδή), κάτι που επηρεάζει δραστικά την σταθερότητα του οχήματος σε ανοικτές καμπές, όπως αυτήν την αντιλαμβάνεται ο μέσος οδηγός τουλάχιστον, αφού τείνει να μεγαλώσει τις όποιες τάσεις υπερστροφής δημιουργούνται. Ένα σύστημα παθητικής τετραδιεύθυνσης σκοπό έχει να αντιστρέψει αυτήν την τάση, στρίβοντας υπό την επίδραση των φυσικών εγκάρσιων δυνάμεων πρόσφυσης στον πίσω άξονα τους τροχούς προς το εσωτερικό της στροφής (στην ίδια φορά με τους εμπρός), δημιουργώντας με άλλα λόγια λίιιιγη επιτηδευμένη υποστροφή, που κάνει το αυτοκίνητο λιγότερο νευρικό στα πολλά. Όλο αυτό επιτυγχάνεται πολύ απλά μέσω ενός «προσχεδιασμένου τζόγου» στα εξαρτήματα της ανάρτησης και πιο συγκεκριμένα στα σινεμπλόκ και όλους τους ελαστικούς συνδέσμους του άξονα: αλλάζοντας επιλεκτικά την σκληρότητα των ελαστικών συνδέσμων, επιτρέπουμε στον τροχό να ενδώσει κατά ελάχιστες μοίρες του κατακόρυφου άξονα ως προς την έδραση του, είτε αυτή είναι μασίφ άκαμπτος πίσω άξονας, είτε βραχίονας ανεξάρτητης ανάρτησης του οποίου η ενδοτικότητα πρακτικά αυτορυθμίζει την σύγκλιση του τροχού. Ειδική μνεία χρήζουν οι αναρτήσεις με πίσω ημιυστερούντες βραχίονες, οι οποίες εκ φύσεως δίνουν υπερστροφική παθητική τετραδιεύθυνση, δηλαδή, κόντρα στο ρεύμα που περιγράψαμε, έχουν σχεδιαστεί ώστε ακριβώς να δίνουν μία σχετική νευρικότητα η οποία εδώ θεωρείται «καλή», αφού ερμηνεύεται ως ευελιξία: χαρακτηριστικότερο παράδειγμα τέτοιων «παιχνιδιάρικων» διατάξεων παθητικής τετραδιεύθυνσης είναι οι πίσω αναρτήσεις γαλλικών hatchback της δεκαετίας του ’90 (βλ. σαξόραλλα), τα οποία ως γνωστόν στρίβανε «με τα τέσσερα» και στα οποία είχες περισσότερες πιθανότητες να χάσεις απότομα το κώλο από τα πισωκίνητα της εποχής. Καλή αυτή η ευελιξία, δεν λέω, αλλά είμαι σίγουρος ότι πολλοί παθόντες αυτή τη στιγμή σιχτιρίζουν που βάλανε το λιθαράκι τους στο καινούργιο εξοχικό του φαναρτζή τους...
...και τετραδιεύθυνση για «ενεργητικούς»
Καλά τα παθητικά συστήματα, αλλά όπως καθετί παθητικό στο μάταιο τούτο κόσμο, αποτελεί «δεύτερο βιολί»: γιατί να μην έχουμε ένα σύστημα το οποίο από μόνο του και με τις ίδιες δυνάμεις του να μπορεί να στρίβει τους πίσω τροχούς 100% ελεγχόμενα, χωρίς να περιμένει τις εγκάρσιες δυνάμεις πρόσφυσης όπως στα παθητικά συστήματα? «Ενεργητική τετραδιεύθυνση λοιπόν» και τα μυαλά στα κάγκελα, με τους Ιάπωνες και εδώ να δείχνουν το δρόμο. Πιο συγκεκριμένα, αυτό έγινε το 1986 και στο γνωστό, από τα Skyline κυρίως, σύστημα HICAS της Nissan που ήταν και το πρώτο του είδους. Τα συστήματα ενεργητικής τετραδιεύθυνσης παραδοσιακά τα αγαπάγανε οι ιαπωνικές αυτοκινητοβιομηχανίες, ιδιαίτερα στο μπαμ που έκανε η τεχνολογία στα τέλη των ‘80s και αρχές ‘90s. Οι Γερμανοί της BMW εφάρμοσαν την τεχνολογία και αυτοί τότε, στις αρχές του ‘90, μετά τα ξεχάσανε και τα ξαναθυμηθήκανε τα τελευταία χρόνια στα premium μοντέλα τους. Οι Αμερικάνοι της GM, μέσω του συστήματος Quadrasteer Delphi κάνανε και αυτοί μία στροφή προς την τετραδιεύθυνση στο ενδιάμεσο (2002-2005), αλλά λόγω κόστους το ξανασκέφτηκαν: το υψηλό κόστος είναι η μεγαλύτερη τροχοπέδη στην ευρεία εξάπλωση των συστημάτων ενεργητικής τετραδιεύθυνσης, αφού πέραν των δυναμικών πλεονεκτημάτων που δεδομένα προσφέρει, πρέπει να προϋπολογίσεις λογιστικά «επί δύο» το κόστος ενός υποσυστήματος που σε απλή μορφή θα κάνει μόνο του το περισσότερο μέρος της δουλειάς απροβλημάτιστα. Εξ’ αιτίας αυτού και με σύμμαχο την ανάπτυξη του ηλεκτρονικού ελέγχου, στην πορεία του χρόνου τα ενεργητικά συστήματα, αντί να γίνουν πιο πολύπλοκα, έγιναν πιο απλοϊκά: τα βαρβάτα υδραυλικά και μηχανικά συστήματα με κομπλέ πίσω κρεμαγιέρες και σωληνώσεις / άξονες που διέτρεχαν ολόκληρο το αμάξωμα από εμπρός μέχρι πίσω, σταδιακά έδωσαν τη θέση τους σε απλούς ηλεκτρομηχανικούς ενεργοποιητές (actuators) οι οποίο αφήνουν τον πίσω άξονα να παίζει σόλο, χωρίς να «απομυζεί» ενέργεια άμεσα από τον εμπρός άξονα ή / και τον κινητήρα.
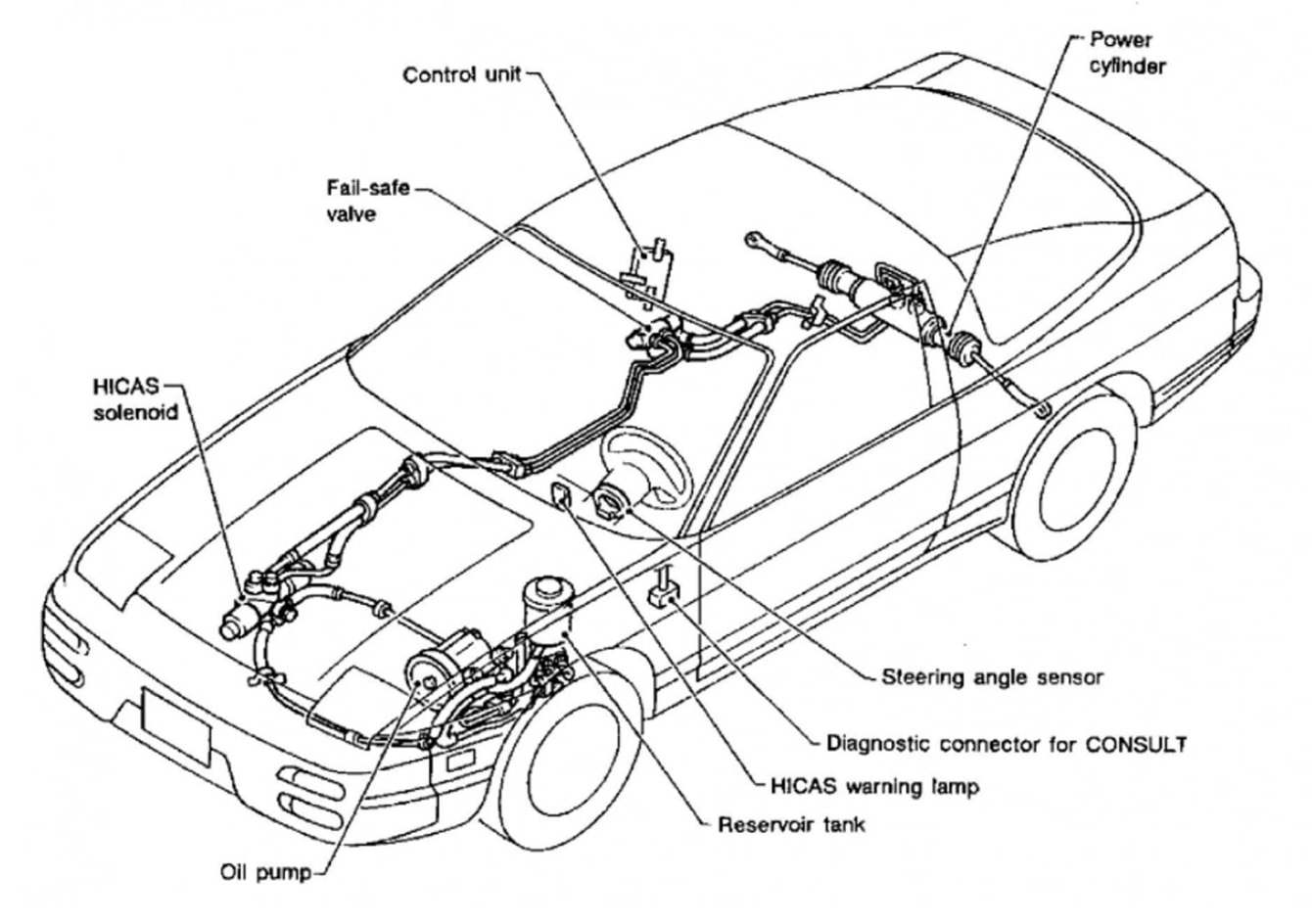
Ας τα δούμε όλά αυτά όμως με τη σειρά, ξεκινώντας από τον πρωτοπόρο, το «High Capacity Actively Controlled Steering» της Nissan. Το HICAS έκανε ντεμπούτο στο Skyline GTS του 1986 (R31), χρησιμοποιήθηκε στη συνέχεια σε διάφορα άλλα μοντέλα της εταιρίας ως βασικός ή προαιρετικός εξοπλισμός (300ZX/240SX/Silvia S13 & S15/180SX, διάφορα Infiniti) και ήταν τρομακτικά πολύπλοκο: η αντλία του εμπρός υδραυλικού συστήματος έδινε παροχή μέσω σωληνώσεων και σε πίσω κρεμαγιέρα η οποία μέσω αισθητήρων ταχύτητας και γωνίας τιμονιού, με ηλεκτροβαλβίδες και υδραυλική μονάδα ελέγχου, μπορούσε να στρίψει τους τροχούς μέχρι και 10 μοίρες σε κάθε κατεύθυνση. Από το Skyline R33 και μετά, η Nissan πέρασε στο πιο εξελιγμένο «Super HICAS» το οποίο κατήργησε τελείως τα υδραυλικά και ενεργούσε στην πίσω κρεμαγιέρα μέσω ηλεκτρομηχανικού ενεργοποιητή που έπαιρνε πλέον εντολή από δικιά του ECU, κάνοντας το όλο σύστημα πολύ ελαφρύτερο. Τα HICAS / Super HICAS, σε αντίθεση με τα περισσότερα συστήματα ενεργητικής τετραδιεύθυνσης που θα αναφέρουμε παρακάτω, είχαν καθαρά μόνο δυναμικό προσανατολισμό για βελτίωση της οδικής συμπεριφοράς από κάποια ταχύτητα και άνω, μέσω συνεχούς προσαρμογής του yaw των πίσω τροχών είτε ομόρροπα, είτε αντίρροπα με τους εμπρός (ανάλογα με τις εντολές της μονάδας ελέγχου), και όχι π.χ. διευκόλυνσης του παρκαρίσματος σε επί τόπου ελιγμούς. Δούλευε σωστά στη πράξη? Οι απόψεις διίστανται, ανάλογα με τη σκοπιά, αφού από την μία είναι σίγουρο πως έναν νορμάλ οδηγό τον έκανε πολύ πιο γρήγορο σε μεικτή διαδρομή, ουσιαστικά ρυθμίζοντας μόνο του τις τάσεις υπο/υπερστροφής, αλλά από την άλλη, αυτή η «πρωτοβουλία» έκανε το αυτοκίνητο σε έμπειρα χέρια απρόβλεπτο και αυτόβουλο: δεν είναι τυχαίο ότι πολλά «πιστάτα» Skyline καταργούν τελείως το σύστημα, κερδίζοντας βάρος και, στα χέρια των κατάλληλων χεράδων, και δέκατα στο χρόνο γύρου.
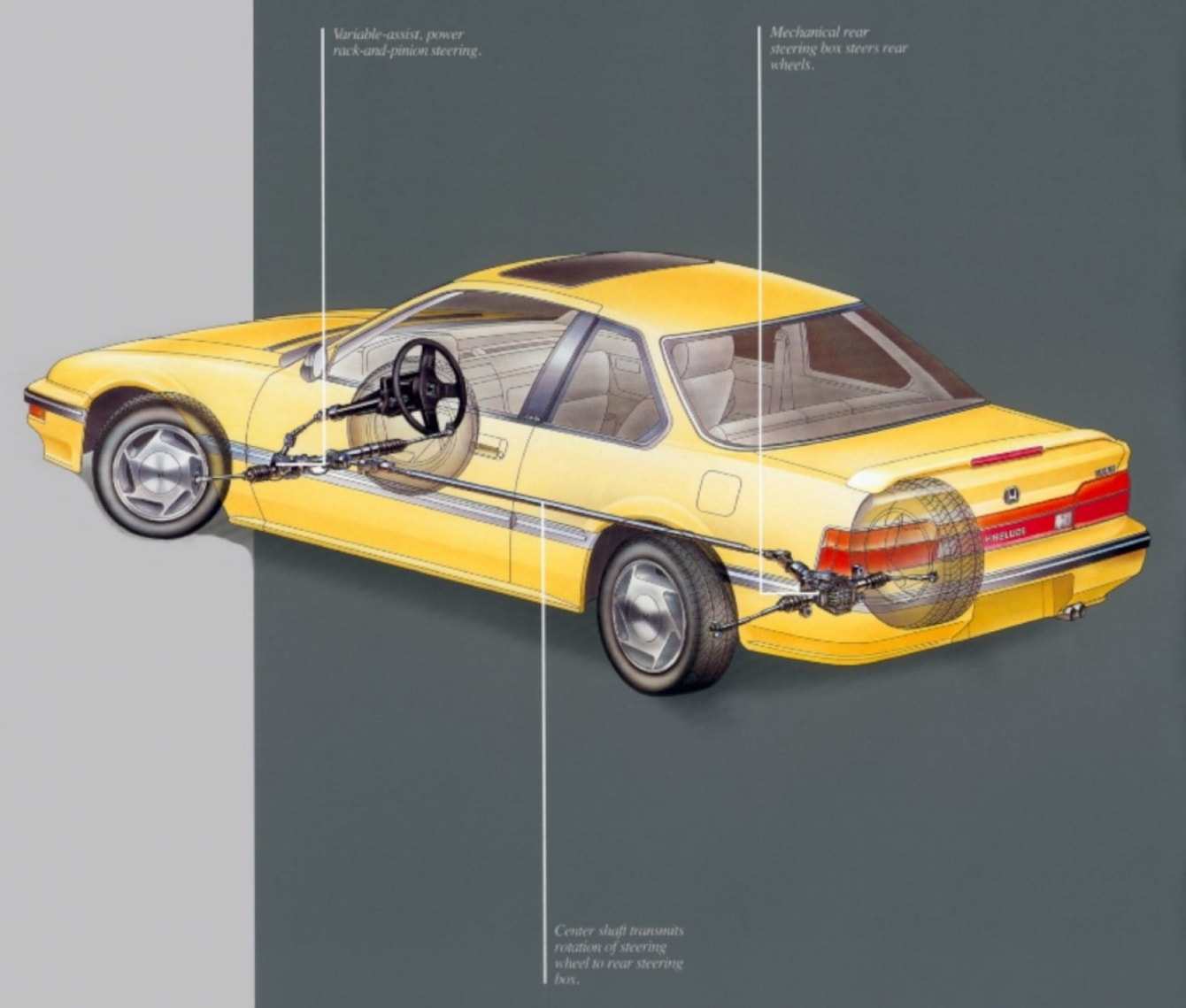
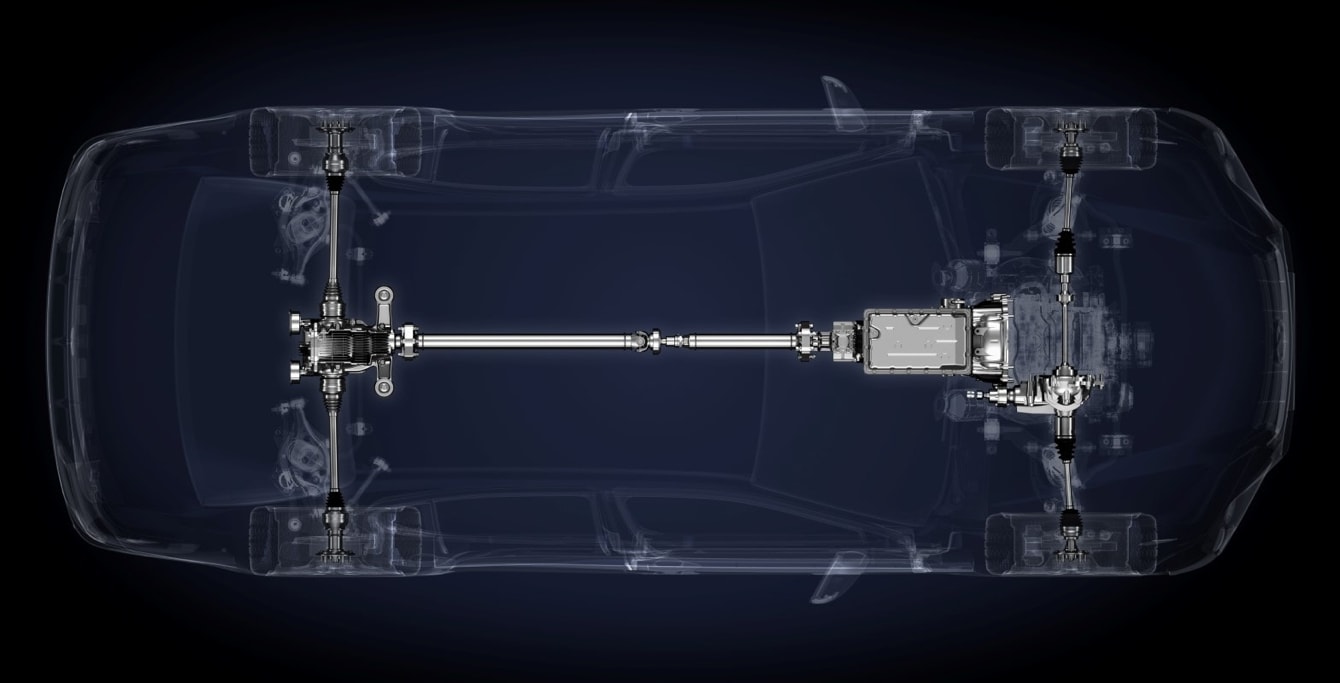
Άξιο αναφοράς είναι και το αντίστοιχο ενεργητικό σύστημα της Honda, που ντεμπουτάρισε ένα χρόνο αργότερα (1987) στο τότε Prelude και του οποίου η διαφορά ήταν πως επρόκειτο για ένα εντελώς μηχανικό στη λειτουργία του σύστημα (και μέχρι σήμερα παραμένει το μόνο του είδους του). Από την εμπρός κρεμαγιέρα έφευγε ολόκληρος άξονας κατά μήκος του αμαξώματος (σαν κεντρικός άξονας πισωκίνητου δηλαδή) και κούμπωνε στη πίσω κρεμαγιέρα μέσω ενός μικρού πλανητικού κιβωτίου: με αμιγώς μηχανικό τρόπο το σύστημα κατάφερνε να γυρνάει του πίσω τροχούς στην ίδια φορά με τους εμπρός για μικρές γωνίες τιμονιού (δηλαδή για σταθερότητα στις υψηλές ταχύτητες και για μέχρι 1,5 μοίρα) και στην αντίθετη φορά σε μεγάλες γωνίες τιμονιού (δηλαδή για ευκολία στους ελιγμούς παρκαρίσματος και για μέχρι 3,5 μοίρες). Στο Prelude της επόμενης γενιάς (1991) όλα άλλαξαν και η Honda αντικατέστησε το σύστημα με ηλεκτρονικό. Η Mazda στα 626/MX6 και η Toyota στο Camry, επίσης προσέφεραν ενεργητική τετραδιεύθυνση εν έτει 1988, αλλά λίγο παραπάνω θα σταθούμε στην άποψη των Γερμανών πάνω στο θέμα, η οποία ξεκινάει το 1991 και την Euro-spec 850CSi (Ε31). Το «Active Rear Axle Kinematics (ARAK)» ή «Aktive Hinterachskinematik (AHK)» στα γερμανικά, εξελίχτηκε παρέα με την Bosch και ήταν ένα «a la HICAS» πολύπλοκο ηλεκτροϋδραυλικό και ηλεκτρονικά ελεγχόμενο σύστημα, που έπαιρνε σήμα σχετικά με την ταχύτητα οχήματος και του στριψίματος τιμονιού και ως κύρια δουλειά είχε να πάει ένα βήμα παραπέρα την παθητική τετραδιεύθυνση, που ήδη διέθετε ο πίσω «IntegralRearAxle» της BMW: πριν ζοριστεί παθητικά ο άξονας από τις εγκάρσιες δυνάμεις, το AHK είχε αρχίσει ήδη να τον φορτίζει.
Το 1994 η BMW άφησε πίσω και αυτή το σύστημα για οικονομοτεχνικούς λόγους και πλέον την δουλειά του ΑΗΚ σε μεγάλο βαθμό την μετέφερε στο πρωτοεμφανιζόμενο τότε σύστημα ευστάθειας DSC. Μετά από ένα μεγάλο διάλειμμα, τo 2008 με την νέα 7άρα (F01/F02) ωστόσο, η BMW ξαναθυμήθηκε την ενεργητική τετραδιεύθυνση με το «Integral Active Steering» (IAS) το οποίο επενεργεί τόσο στις χαμηλές ταχύτητες, όσο και στις υψηλές. Είναι πολύ πιο απλό από το ΑΗΚ, ακολουθώντας την μόδα των σύγχρονων, φτηνότερων και πιο αξιόπιστων, ηλεκτρομηχανικών ενεργητικών συστημάτων.
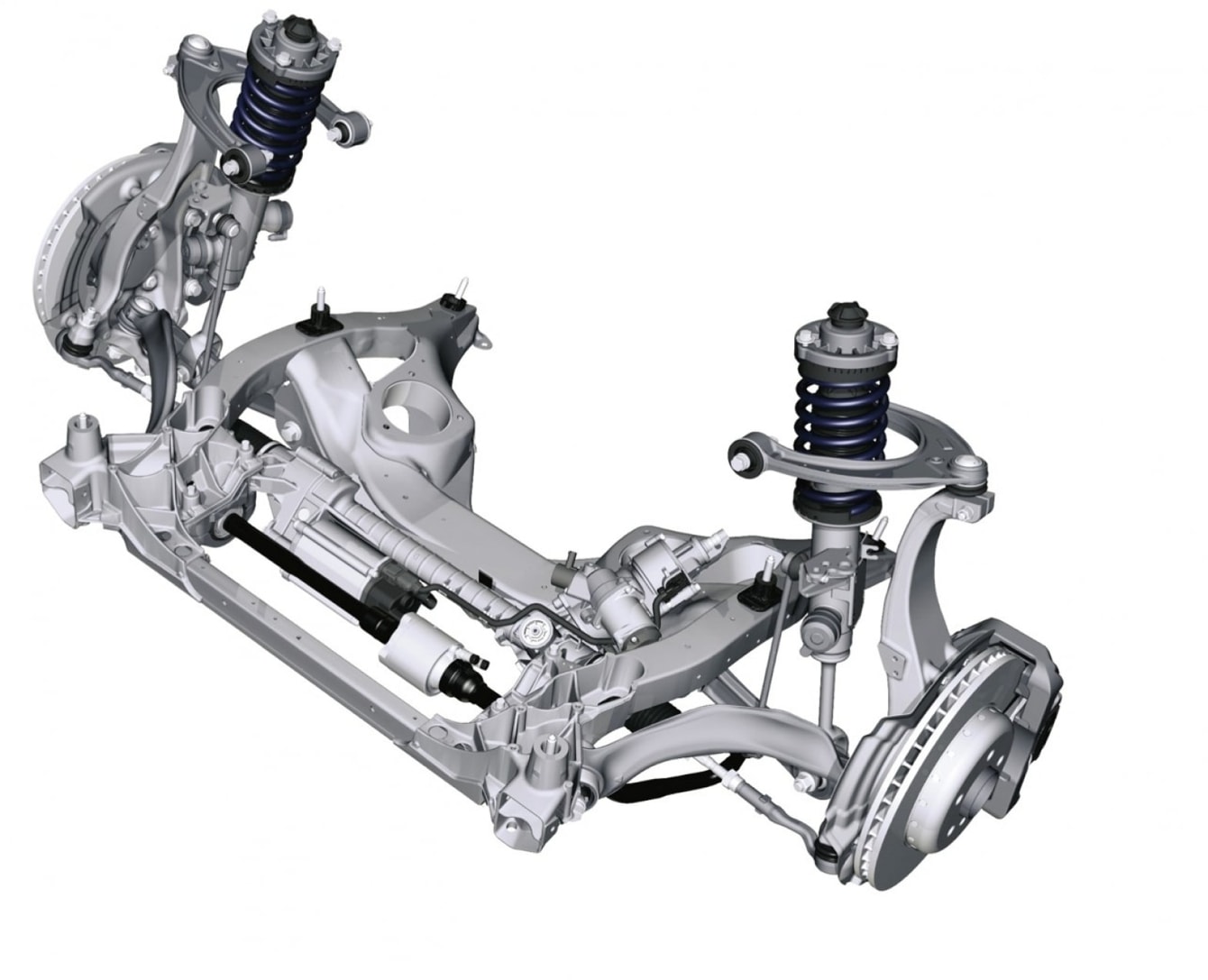
Η Renault επίσης, μπήκε στο χορό το 2008 με το "Active Drive" της Laguna, αλλά το πραγματικό σοκ έλαβε χώρα φέτος και συγκεκριμένα με τις GT3/Turbo/Turbo S εκδόσεις της νέας 911 (991): το σύστημα ενεργητικής τετραδιεύθυνσης είναι στάνταρντ στα μοντέλα αυτά και οι μηχανικοί της Porscheορκίζονται πως μεταμορφώνει την σπορ συμπεριφορά προς το καλό. Το σύστημα περιλαμβάνει δύο τροποποιημένους βραχίονες πίσω ανάρτησης όπου πλέον, αντί για «μασίφ» έχουν ενσωματωμένους ενεργοποιητές που μεταβάλουν το μήκος τους και επομένως και το στρίψιμο του τροχού. Κάτω από τα 50km/h οι πίσω τροχοί στρίβουν αντίρροπα, ενώ πάνω από τα 80km/h ομόρροπα: σύμφωνα με την Porsche, αυτό σημαίνει πως είναι σαν να μεγαλώνει το μεταξόνιο κατά 500mm στα πολλά χιλιόμετρα και να μικραίνει κατά 150mm στο παρκάρισμα. Γερμανοί...
Κάν’ το όπως το F-22
Πολύπλοκα δεν είναι όμως όλα αυτά που είδαμε και πιο πάνω και στα προηγούμενα μέρη? Υδραυλικά, μηχανικά, γρανάζια, χαμός. Και επίσης, ακόμα και με (την όποια) υποβοήθηση, μία άλφα δύναμη βρε αδερφέ πρέπει να την βάλουμε, το λέει και η λέξη, «βοήθεια» προσφέρει το σύστημα και τα μπράτσα μας ενώνονται μηχανικά σε κάθε περίπτωση με τους τροχούς. Τι θα γινόταν όμως αν δεν υπήρχε καμία φυσική διασύνδεση των άκρων μας με τους τροχούς? Η απάντηση είναι ότι θα είχαμε το λεγόμενο “steer-by-wire” σύστημα διεύθυνσης. Εδώ πετάμε στον κάλαθο κολώνες, πηνιόν, κρεμαγιέρες και όλα γίνονται με μαγικό κουμπάκι: actuators λαμβάνουν εντολές από σχετική κεντρική ηλεκτρονική μονάδα, η οποία με τη σειρά της έχει πάρει εντολή από εμάς μέσω joystick, τιμόνι τύπου ΚΙΤΤ, κουμπιών κτλ. (φυσικά και από μύριους άλλους αισθητήρες του αμαξώματος, από τους οποίους σήμερα παίρνουν εντολές και τα κλασικά συστήματα) και το στρίψιμο είναι πλέον παντελώς… Gran Turismo.
Tα πλεονεκτήματα που μπορεί να βρει κανείς σε ένα τέτοιο σύστημα είναι πως δεν χρειάζεται να προβλεφθεί χώρος στη καμπίνα, τρύπες στο καθρέπτη και ύψος στον εμπρός άξονα για κολώνα-κρεμαγιέρα, σε γερή στούκα λιγότερα «μυτερά» κομμάτια εισβάλουν απειλητικά στην καμπίνα και φυσικά τα χαρακτηριστικά «σχέσης» μετάδοσης και ανάδρασης ρυθμίζονται διαρκώς αυτόματα και χωρίς περιορισμούς σε εύρος. Steer-by-wire συστήματα διαθέτουν πάρα πολλά πρωτότυπα / πειραματικά οχήματα πολλών μεγάλων κατασκευαστών που βλέπουμε στις εκθέσεις, αλλά τα μοντέλα παραγωγής με τέτοιο σύστημα είναι ακριβώς ....κανένα: η τεχνολογία υπάρχει εδώ και χρόνια, το κόστος είναι μεν μεγάλο, αλλά δεν θα ήταν πρόβλημα σε premium αυτοκίνητα, οπότε γιατί όχι? Η απάντηση είναι πως δεν είμαστε ακόμα έτοιμοι για κάτι τέτοιο, αφενός νομοθετικά και αφετέρου «κοινωνικά»: το παραμικρό “bug” ή κόλλημα του συστήματος θα ήταν προφανώς μοιραίο, οπότε ένα τέτοιο σύστημα θα έπρεπε να ήταν από την μία τρομακτικά αξιόπιστο (βλ. κόστος) και από την άλλη με τρελές δικλείδες ασφαλείας, αφού η αστοχία του θα ήταν απλά απαγορευτική (σε ένα «συμβατικό» σύστημα, όση τεχνολογία και να έχει αυτό πάνω του, στο τέλος της ημέρας πάντα υπάρχει μηχανική σύνδεση με τους τροχούς, ακόμα και αν αυτό απαιτεί δύναμη... Κουταλιανού). Δεν υπάρχει επομένως ούτε το αντίστοιχο νομικό πλαίσιο ανά τον κόσμο που να το επιτρέπει ακόμα, ούτε και ιδιαίτερη λόξα από τους αγοραστές να παίξουν έστω και με αυτό το ένα στο εκατομμύριο, ακόμα κι αν είναι καθαρά ψυχολογικό (ένα βραχυκύκλωμα και ...μπαμ!). Τα ίδια βέβαια κάποτε λεγόντουσαν και για τα «ντιζάτα» ή υδραυλικά χειριστήρια στα αεροπλάνα: σήμερα, τόσο τα νέα μαχητικά, όσο και τα πολιτικά αεροσκάφη, είναι όλα κατ’ αντιστοιχία «steer»(fly)-by-wire και μιλάμε για «οχήματα» εκατομμυρίων που μεταφέρουν εκατοντάδες ανθρώπους με απόλυτη ασφάλεια. Με άλλα λόγια, μην έχετε καμία αμφιβολία πως είναι απλά θέμα χρόνου να περάσουν και αυτά στην αυτοκινητοβιομηχανία όταν ωριμάσει λίγο παραπάνω το θέμα. Δυστυχώς, για τις γενιές μας που μεγαλώσανε με τιμόνια-ποιήματα όπως αυτά των Rallye, των Evo, των 911 κτλ., πιθανόν αυτό να γίνει πιο γρήγορα και από ότι φαντάζεστε...
Και τώρα επί του πρακτέου
Χορτάσατε θεωρία και φουλ τεχνική επεξήγηση τέσσερις μήνες τώρα? Κι εγώ το ίδιο. Γι’ αυτό λοιπόν, για το πέμπτο και τελευταίο μέρος της σειράς μας, έχω αφήσει το πρακτικόν του θέματος, που δεν είναι άλλο από μία παρουσίαση «αγωνιάρικης» ρύθμισης όλων των παραμέτρων που επηρεάζουν το στρίψιμο: από τη εργοστασιακή γεωμετρία εμπρός και πίσω άξονα του πειραματόζωου, μέχρι custom πειράγματα, αναζητώντας την υποκειμενική τελειότητα: η ευθυγράμμιση όπως δεν την ξανάδατε ποτέ.

Αρθρογράφος
Δοκιμές Αυτοκινήτου CarTest.gr

Μέσα από ένα σύντομο σχετικά βίντεο, θα μάθετε αρκετά πράγματα για την ζωή ενός θρύλου, του ανθρώπου που δεν άφησε ποτέ το γκάζι. Του Colin McRae.
